Portalroboter
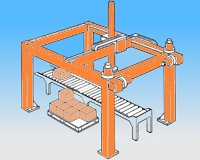
Kinematik eines Portalroboters
Mit Portalroboter bezeichnet man aufgeständerte Roboteranlagen, die durch drei lineare Hauptachsen einen kubischen Greifraum aufspannen. Vollportale stehen hierbei auf vier Füßen, Halbportale stehen auf zwei Füßen. Die eigentliche Roboterkinematik bzw. die bewegten Achsen befinden sich oberhalb dieser Aufständerung.
Eigenschaften von Portalrobotern
Die Füße müssen bei diesem Typ Roboter sehr robust und massiv ausgeführt sein, damit die Dynamik der oben laufenden Achsen keine Schwingungen in den gesamten Aufbau einbringen kann.
Portalroboter können auf Grund ihrer Bauweise einen recht großen Arbeitsraum abdecken. Ein weiterer Vorteil liegt in der ebenfalls recht hohen Traglast, da die zu tragenden Lasten über die oberen Portalachsen zweiseitig gut abgefangen werden können.
Der Produktzulauf ist – wenn man von den Beinen einmal absieht – von allen Seiten und aus allen Richtungen möglich.
Hubachse des Greifers
Der notwendige Hub wird je nach Hersteller über verschiedene Techniken realisiert. Die einfachste Lösung ist eine vertikale Stange, welche sich in ihrer ganzen Länge von oben nach unten bewegt. In der oberen Position ragt diese Hubachse weit nach oben heraus.
Eine andere Lösung ist es die Hubachse teleskopierbar zu gestalten. Diese Lösung ist technisch und somit auch kostenmäßig aufwendiger, stellt aber an die Hallenhöhe weniger Anforderungen. Daneben existieren auch Sonderlösungen, wie z.B. das synchrone Auf- und Abwickeln von Tragbändern um den Greifkopf zu heben und zu senken.
Die Portalrobotertypen, die für Palettieraufgaben angeboten werden, weisen üblicherweise eine vierte Achse (Drehachse) auf, um die Packstücke auf der Palette ausrichten zu können.
